Matrice (mathématiques) : définition, opérations, exemples et usages
Matrice (mathématiques) : définition claire, opérations, exemples et usages pratiques — algèbre linéaire, informatique et sciences pour comprendre et manipuler les matrices au quotidien.
En mathématiques, une matrice (au pluriel : matrices) est un rectangle de nombres, disposés en lignes et en colonnes. Les lignes sont chacune de gauche à droite (horizontale) et les colonnes vont de haut en bas (verticale). La cellule supérieure gauche se trouve à la ligne 1, colonne 1 (voir le schéma à droite).
Il existe des règles pour l'addition, la soustraction et la "multiplication" des matrices, mais elles sont différentes de celles qui s'appliquent aux nombres. A titre d'exemple, A ⋅ B {\displaystyle A\cdot B} ne donne pas toujours le même résultat que B ⋅ A {\displaystyle B\cdot A}
donne pas toujours le même résultat que B ⋅ A {\displaystyle B\cdot A} ce qui est le cas pour la multiplication des nombres ordinaires. Une matrice peut avoir plus de 2 dimensions, comme une matrice 3D. Une matrice peut également être unidimensionnelle, sous la forme d'une seule ligne ou colonne.
ce qui est le cas pour la multiplication des nombres ordinaires. Une matrice peut avoir plus de 2 dimensions, comme une matrice 3D. Une matrice peut également être unidimensionnelle, sous la forme d'une seule ligne ou colonne.
De nombreuses sciences naturelles utilisent beaucoup les matrices. Dans de nombreuses universités, les cours sur les matrices (généralement appelés algèbre linéaire) sont enseignés très tôt, parfois même en première année d'études. Les matrices sont également très courantes en informatique.
Galerie d’images
1 Image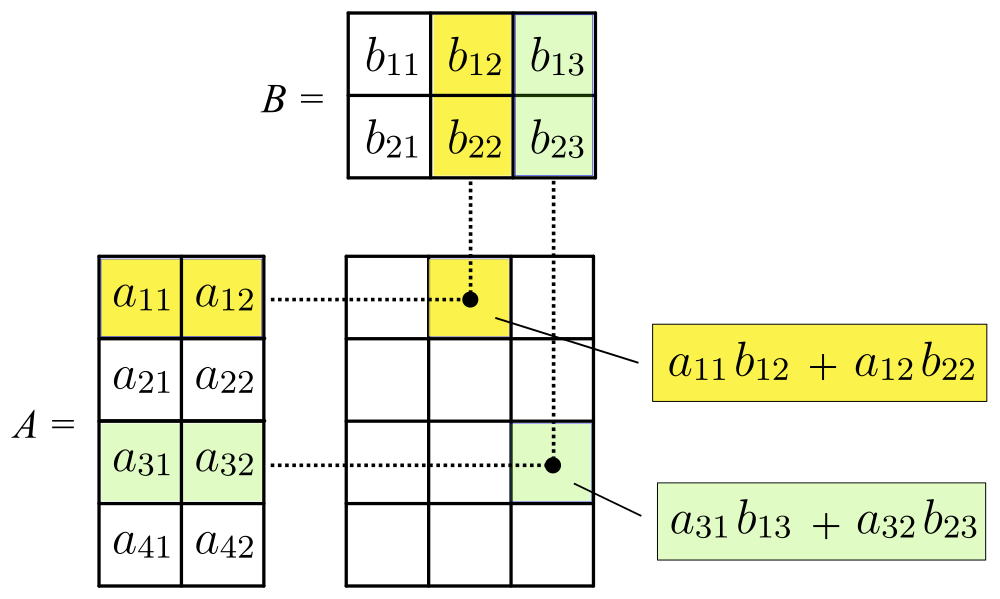
Définition formelle et notation
On appelle matrice un tableau rectangulaire d'éléments (nombres, mais aussi parfois fonctions ou autres objets) rangés en m lignes et n colonnes. On dit que la matrice a ordre m × n (ou dimension m × n). L'entrée située à la ligne i et à la colonne j est notée généralement aij (ou a[i,j]). Une matrice carrée est une matrice pour laquelle m = n.
Types particuliers de matrices
- Matrice nulle : toutes les entrées sont nulles.
- Matrice identité In (n × n) : 1 sur la diagonale principale et 0 ailleurs ; pour toute matrice A de taille compatible, A·I = A et I·A = A.
- Matrice diagonale : toutes les entrées hors diagonale principale sont nulles.
- Matrice symétrique : A = AT (égalité avec sa transposée).
- Matrice inversible : matrice carrée qui possède une inverse B telle que A·B = B·A = I.
Opérations principales
- Addition et soustraction : deux matrices s'additionnent seulement si elles ont la même taille. L'opération se fait composante par composante : (A + B)ij = Aij + Bij.
- Multiplication par un scalaire : on multiplie chaque entrée par le scalaire.
- Multiplication de matrices : si A est de taille m × p et B de taille p × n, alors le produit C = A·B est défini et est de taille m × n. Chaque coefficient est la somme des produits correspondants : Cij = somme_{k=1..p} Aik · Bkj. La multiplication de matrices n'est pas commutative en général : A·B ≠ B·A.
- Transposée : la transposée AT échange lignes et colonnes : (AT)ij = Aji.
- Inverse : pour une matrice carrée A, l'inverse A−1 (si elle existe) vérifie A·A−1 = A−1·A = I. Une matrice est inversible si et seulement si son déterminant est non nul (pour les matrices sur un corps commutatif, comme R ou C).
- Déterminant (pour matrices carrées) : un scalaire associé à la matrice, utile pour tester l'inversibilité et pour calculer des volumes orientés, etc. Par exemple pour une matrice 2×2 A = [[a, b], [c, d]], det(A) = a·d − b·c.
- Rang : le rang d'une matrice est le nombre maximal de lignes (ou colonnes) linéairement indépendantes ; il mesure l'information effectivement contenue dans la matrice.
Exemples simples
Addition :
A = [[1, 2], [3, 4]] et B = [[5, 6], [7, 8]] ⇒ A + B = [[6, 8], [10, 12]].
Multiplication par un scalaire :
2 · A = [[2, 4], [6, 8]].
Multiplication de matrices :
A = [[1, 2], [3, 4]] et B = [[0, 1], [1, 0]] ⇒ A·B = [[1·0+2·1, 1·1+2·0], [3·0+4·1, 3·1+4·0]] = [[2, 1], [4, 3]].
On voit que B·A = [[0·1+1·3, 0·2+1·4], [1·1+0·3, 1·2+0·4]] = [[3, 4], [1, 2]] ≠ A·B.
Déterminant d'une 2×2 :
Pour A = [[a, b], [c, d]], det(A) = a·d − b·c. Si det(A) ≠ 0 alors A est inversible.
Propriétés algébriques utiles
- L'addition est commutative et associative : A + B = B + A, (A + B) + C = A + (B + C).
- La multiplication matricielle est associative : (A·B)·C = A·(B·C).
- Distributivité : A·(B + C) = A·B + A·C et (A + B)·C = A·C + B·C.
- Transposée du produit : (A·B)T = BT·AT.
- Si A est inversible, alors AT l'est aussi et (AT)−1 = (A−1)T.
Notions avancées et généralisations
Techniquement, une « matrice » désigne habituellement un tableau à deux dimensions. Les tableaux à plus de deux dimensions sont appelés tensors ou tenseurs en français. Les vecteurs sont des cas particuliers de matrices unidimensionnelles (1×n ou n×1). D'autres notions associées : valeurs propres et vecteurs propres (spectre d'une matrice), décompositions (LU, QR, SVD) très utiles en calcul numérique et en statistique.
Applications et usages
- Résolution de systèmes linéaires : écrire un système linéaire sous la forme Ax = b et utiliser méthodes directes (Gauss) ou itératives.
- Géométrie et transformations linéaires : rotation, homothétie, projection en 2D/3D (informatique graphique).
- Statistiques et apprentissage automatique : matrices de covariance, moindres carrés, réseaux de neurones (calcul matriciel intensif).
- Physique : mécanique quantique (opérateurs), études de systèmes linéaires.
- Traitement du signal et image : convolution, filtrage, compression d'images (SVD).
- Théorie des graphes : matrices d'adjacence et d'incidence pour représenter des réseaux.
- Chaînes de Markov : matrices stochastiques modélisent les transitions entre états.
- Informatique : base des bibliothèques numériques (BLAS, LAPACK), calcul parallèle, et structures de données (matrices creuses pour grands graphes).
Aspects numériques et algorithmiques
Le calcul matriciel est au cœur du calcul scientifique. L'algorithme naïf de multiplication de deux matrices n × n a une complexité de l'ordre de O(n³), mais des méthodes plus rapides (Strassen, Coppersmith–Winograd et variantes) existent. En pratique, on utilise des bibliothèques optimisées (par exemple BLAS, LAPACK, ou frameworks comme NumPy, MATLAB) qui tirent parti du parallélisme matériel et des optimisations mémoire. Pour les grandes matrices creuses, des algorithmes et structures spécialisés permettent d'économiser du temps et de la mémoire.
En résumé, les matrices sont des objets mathématiques simples à définir mais extrêmement puissants et universels : elles modélisent des relations linéaires, accélèrent le calcul numérique et sont omniprésentes dans les sciences, l'ingénierie et l'informatique.

Définitions et notations
Les lignes horizontales dans une matrice sont appelées lignes et les lignes verticales sont appelées colonnes. Une matrice de m lignes et n colonnes est appelée matrice m par n (ou matrice m×n) et m et n sont appelés ses dimensions.
Les endroits de la matrice où se trouvent les numéros sont appelés des entrées. L'entrée d'une matrice A qui se trouve dans la ligne i et la colonne j est appelée entrée i,j de A. Elle s'écrit A[i,j] ou ai,j.
Nous écrivons A := ( a i j ) m × n {\displaystyle A:=(a_{ij})_{m\times n}} pour définir une matrice A m × n avec chaque entrée dans la matrice appelée ai,j pour tous les 1 ≤ i ≤ m et 1 ≤ j ≤ n.
pour définir une matrice A m × n avec chaque entrée dans la matrice appelée ai,j pour tous les 1 ≤ i ≤ m et 1 ≤ j ≤ n.
Exemple
La matrice
[ 1 2 3 1 2 7 4 9 2 6 1 5 ] {\displaystyle {\begin{bmatrix}1&2&3\\\1&2&7\\\4&9&2\\6&1&5\end{bmatrix}}
est une matrice 4×3. Cette matrice a m=4 lignes, et n=3 colonnes.
L'élément A [2,3] ou a2,3 est 7.
Opérations
Ajout
La somme de deux matrices est la matrice, dont la (i,j)-ième entrée est égale à la somme des (i,j)-ième entrées de deux matrices :
[ 1 3 2 1 0 0 1 2 2 ] + [ 0 0 5 7 5 0 2 1 1 ] = [ 1 + 0 3 + 0 2 + 5 1 + 7 0 + 5 0 + 0 1 + 2 2 + 1 2 + 1 ] = [ 1 3 7 8 5 0 3 3 3 ] {\style d'affichage {\begin{bmatrix}1&3&2\\1&0&0\\1&2&2\end{bmatrix}}+{\begin{bmatrix}0&0&5\\7&5&0\\2&1&1\end{bmatrix}}={\begin{bmatrix}1+0&3+0&2+5\\1+7&0+5&0+0\\1+2&2+1&2+1\end{bmatrix}}={\begin{bmatrix}1&3&7\\8&5&0\\3&3&3\end{bmatrix}}}
Les deux matrices ont les mêmes dimensions. Ici, A + B = B + A {\displaystyle A+B=B+A} est vrai.
est vrai.
Multiplication de deux matrices
La multiplication de deux matrices est un peu plus compliquée :
[ a 1 a 2 a 3 a 4 ] ⋅ [ b 1 b 2 b 3 b 4 ] = [ ( a 1 ⋅ b 1 + a 2 ⋅ b 3 ) ( a 1 ⋅ b 2 + a 2 ⋅ b 4 ) ( a 3 ⋅ b 1 + a 4 ⋅ b 3 ) ( a 3 ⋅ b 2 + a 4 ⋅ b 4 ) ] {\displaystyle {\begin{bmatrix}a1&a2\\a3&a4\\\end{bmatrix}}\cdot {\begin{bmatrix}b1&b2\\b3&b4\\\\end{bmatrix}}={\begin{bmatrix}(a1\cdot b1+a2\cdot b3)&(a1\cdot b2+a2\cdot b4)\\\(a3\cdot b1+a4\cdot b3)&(a3\cdot b2+a4\cdot b4)\\\\\end{bmatrix}}}}
Donc avec les chiffres :
[ 3 5 1 4 ] ⋅ [ 2 3 5 0 ] = [ ( 3 ⋅ 2 + 5 ⋅ 5 ) ( 3 ⋅ 3 + 5 ⋅ 0 ) ( 1 ⋅ 2 + 4 ⋅ 5 ) ( 1 ⋅ 3 + 4 ⋅ 0 ) ] = [ 31 9 22 3 ] {\displaystyle {\begin{bmatrix}3&5\\\1&4\\\\\end{bmatrix}}\cdot {\begin{bmatrix}2&3\\\5&0\\\\end{bmatrix}}={\begin{bmatrix}(3\cdot 2+5\cdot 5)&(3\cdot 3+5\cdot 0)\\(1\cdot 2+4\cdot 5)&(1\cdot 3+4\cdot 0)\\\\\\\end{bmatrix}}={\begin{bmatrix}31&9\\\\22&3\\\\\\end{bmatrix}}}}
- deux matrices peuvent être multipliées entre elles même si elles ont des dimensions différentes, à condition que le nombre de colonnes dans la première matrice soit égal au nombre de lignes dans la seconde.
- le résultat de la multiplication, appelé le produit, est une autre matrice avec le même nombre de lignes que la première matrice et le même nombre de colonnes que la deuxième matrice.
- la multiplication des matrices n'est pas commutative, ce qui signifie en général que A ⋅ B ≠ B ⋅ A {\displaystyle A\cdot B\neq B\cdot A}

- la multiplication des matrices est associative, ce qui signifie que ( A ⋅ B ) ⋅ C = A ⋅ ( B ⋅ C ) {\displaystyle (A\cdot B)\cdot C=A\cdot (B\cdot C)}

Matrices spéciales
Certaines matrices sont spéciales.
Matrice carrée
Une matrice carrée a le même nombre de lignes que de colonnes, donc m=n.
Voici un exemple de matrice carrée
[ 5 - 2 4 0 9 1 - 7 6 8 ] {\displaystyle {\begin{bmatrix}5&-2&4\\0&9&1\\\-7&6&8\\\\\ end{bmatrix}}}
Cette matrice comporte 3 lignes et 3 colonnes : m=n=3.
Identité
Chaque ensemble de dimensions carrées d'une matrice a une contrepartie spéciale appelée "matrice d'identité". La matrice d'identité n'a que des zéros, sauf sur la diagonale principale, où il y a tous les uns. Par exemple :
[ 1 0 0 0 1 0 0 0 1 ] {\displaystyle {\begin{bmatrix}1&0&0\\0&1&0\\0&0&1\\\\\\ end{bmatrix}}}
est une matrice d'identité. Il existe exactement une matrice d'identité pour chaque ensemble de dimensions carrées. Une matrice d'identité est spéciale car, en multipliant une matrice par la matrice d'identité, le résultat est toujours la matrice d'origine sans aucun changement.
Matrice inverse
Une matrice inverse est une matrice qui, lorsqu'elle est multipliée par une autre matrice, est égale à la matrice d'identité. Par exemple :
[ 7 8 6 7 ] ⋅ [ 7 - 8 - 6 7 ] = [ 1 0 0 1 ] {\displaystyle {\begin{bmatrix}7&8\\\6&7\\\end{bmatrix}}\cdot {\begin{bmatrix}7&-8\\-6&7\\\end{bmatrix}}={\begin{bmatrix}1&0\\0&1\\\end{bmatrix}}}
7 - 8 - 6 7] [style d'affichage] 7&-8\\\\-6&7\\\\\\ fin{bmatrix}}} est l' inverse de [7 8 6 7] [style d'affichage] 7&8\\\\6&7\\\\\ fin{bmatrix}}}
inverse de [7 8 6 7] [style d'affichage] 7&8\\\\6&7\\\\\ fin{bmatrix}}} .
.
La formule pour l'inverse d'une matrice 2x2, [ x y z v ] {\displaystyle {\begin{bmatrix}x&y\\\\z&v\end{bmatrix}} est :
( 1 d e t ) [ v - y - z x ] {\displaystyle \left({\frac {1}{det}}\right){\begin{bmatrix}v&-y\\\\\\-z&x\end{bmatrix}}}
Où d e t {\displaystyle det} est le déterminant de la matrice. Dans une matrice 2x2, le déterminant est égal à
est le déterminant de la matrice. Dans une matrice 2x2, le déterminant est égal à
x v - y z {\displaystyle {xv-yz}}
Matrice à une colonne
Une matrice, qui comporte plusieurs lignes, mais une seule colonne, est appelée un vecteur colonne.
Déterminants
Le déterminant prend une matrice carrée et calcule un nombre simple, un scalaire. Pour comprendre la signification de ce nombre, prenez chaque colonne de la matrice et dessinez-la comme un vecteur. Le parallélogramme dessiné par ces vecteurs a une aire, qui est le déterminant. Pour toutes les matrices 2x2, la formule est très simple : det ( [ a b c d ] ) = a d - b c {\displaystyle \det \left({\begin{bmatrix}a&b\\\\c&d\\\\\ end{bmatrix}}\right)=ad-bc}
Pour les matrices 3x3, la formule est plus compliquée : det ( [ a 1 b 1 c 1 a 2 b 2 c 2 a 3 b 3 c 3 ] ) = a 1 ( b 2 c 3 - c 2 b 3 ) - a 2 ( b 1 c 3 - c 1 b 3 ) + a 3 ( b 1 c 2 - c 1 b 2 ) {\displaystyle \det \left({\begin{bmatrix}a_{1}&b_{1}&c_{1}\\a_{2}&b_{2}&c_{2}\\a_{3}&b_{3}&c_{3}\\\end{bmatrix}}\right)=a_{1}(b_{2}c_{3}-c_{2}b_{3})-a_{2}(b_{1}c_{3}-c_{1}b_{3})+a_{3}(b_{1}c_{2}-c_{1}b_{2})}
Il n'existe pas de formule simple pour les déterminants des grandes matrices, et de nombreux programmeurs informatiques étudient comment faire pour que les ordinateurs trouvent rapidement les grands déterminants.
Propriétés des déterminants
Il y a trois règles que tous les déterminants suivent. Il s'agit des suivantes :
- Le déterminant d'une matrice d'identité est 1
- Si deux lignes ou deux colonnes de la matrice sont échangées, alors le déterminant est multiplié par -1. Les mathématiciens appellent cela l'alternance.
- Si tous les nombres d'une ligne ou d'une colonne sont multipliés par un autre nombre n, alors le déterminant est multiplié par n. De même, si une matrice M a une colonne v, c'est la somme de deux matrices de colonnes v 1 {\displaystyle v_{1}}
 et v 2 {\displaystyle v_{2}}.
et v 2 {\displaystyle v_{2}}. alors le déterminant de M est la somme des déterminants de M avec v 1 {\displaystyle v_{1}} au lieu de v et M avec v 2 {\displaystyle v_{2}} au lieu de v. Ces deux conditions sont appelées multi-linéarité.
alors le déterminant de M est la somme des déterminants de M avec v 1 {\displaystyle v_{1}} au lieu de v et M avec v 2 {\displaystyle v_{2}} au lieu de v. Ces deux conditions sont appelées multi-linéarité.
Voir aussi
- Algèbre linéaire
- Algèbre linéaire numérique
| Contrôle de l'autorité |
|
Questions et réponses
Q : Qu'est-ce qu'une matrice ?
R : Une matrice est un rectangle de nombres, disposés en lignes et en colonnes. Les rangées sont des lignes de gauche à droite (horizontales) et les colonnes vont de haut en bas (verticales).
Q : Comment les matrices sont-elles représentées ?
R : Les matrices sont souvent représentées par des lettres romaines majuscules telles que A, B et C.
Q : Que se passe-t-il lorsque vous multipliez deux matrices ensemble ?
R : Le produit AB ne donne pas toujours le même résultat que BA, ce qui est différent de la multiplication de nombres ordinaires.
Q : Une matrice peut-elle avoir plus de deux dimensions ?
R : Oui, une matrice peut avoir plus de 2 dimensions, comme une matrice 3D. Elle peut également être unidimensionnelle, comme une seule ligne ou colonne.
Q : Où sont utilisées les matrices ?
R : Les matrices sont utilisées dans de nombreuses sciences naturelles et dans l'informatique, l'ingénierie, la physique, l'économie et les statistiques.
Q : Quand les universités enseignent-elles des cours sur les matrices ?
R : Les universités enseignent généralement des cours sur les matrices (généralement appelés algèbre linéaire) très tôt dans les études - parfois même dès la première année d'études.
Q : Est-il possible d'additionner ou de soustraire des matrices ensemble ?
R : Oui - il existe des règles pour ajouter et soustraire des matrices ensemble, mais ces règles diffèrent de celles des nombres ordinaires.
Articles liés
Auteur
AlegsaOnline.com Matrice (mathématiques) : définition, opérations, exemples et usages Leandro Alegsa
URL: https://fr.alegsaonline.com/art/62849